4WS RL Car 제작 Review
Introduction
2024년 2학기, 공학적 설계라는 수업을 들었다.
해당 수업은 1학기동안 자율주행 자동차를 만드는 수업이다.
이 수업을 시작하고, 같은 팀원과 주제에 대해 생각해보았다.
기계트랙 과목이지만 팀원중 2명이 컴퓨터공학 학생이었기 때문에 그 특성을 잘 살릴 수 있는 주제로 설정하였다.
물론, hardware적인 독창성도 챙기기 위해서 다음과 같은 주제를 선정하였다.
4개의 독립적인 wheel을 사용한 강화학습 기반 자율주행
일반적으로 4wheel steering을 사용하면 주행의 자율성이 더 광범위해진다.
이 광범위해진 주행을 일반적인 차량에서 사람이 4개의 wheel을 조작하며 주행할 수는 없다.
이러한 4wheel steering을 이용해서 더 효율적이고, 강력한 주행능력을 가진 차량을 만들기 위해 강화학습을 적용하게 되었다.
Development
Hardware
Hardware는 기계트랙을 전공하는 팀원이 주도해서 제작하였다.
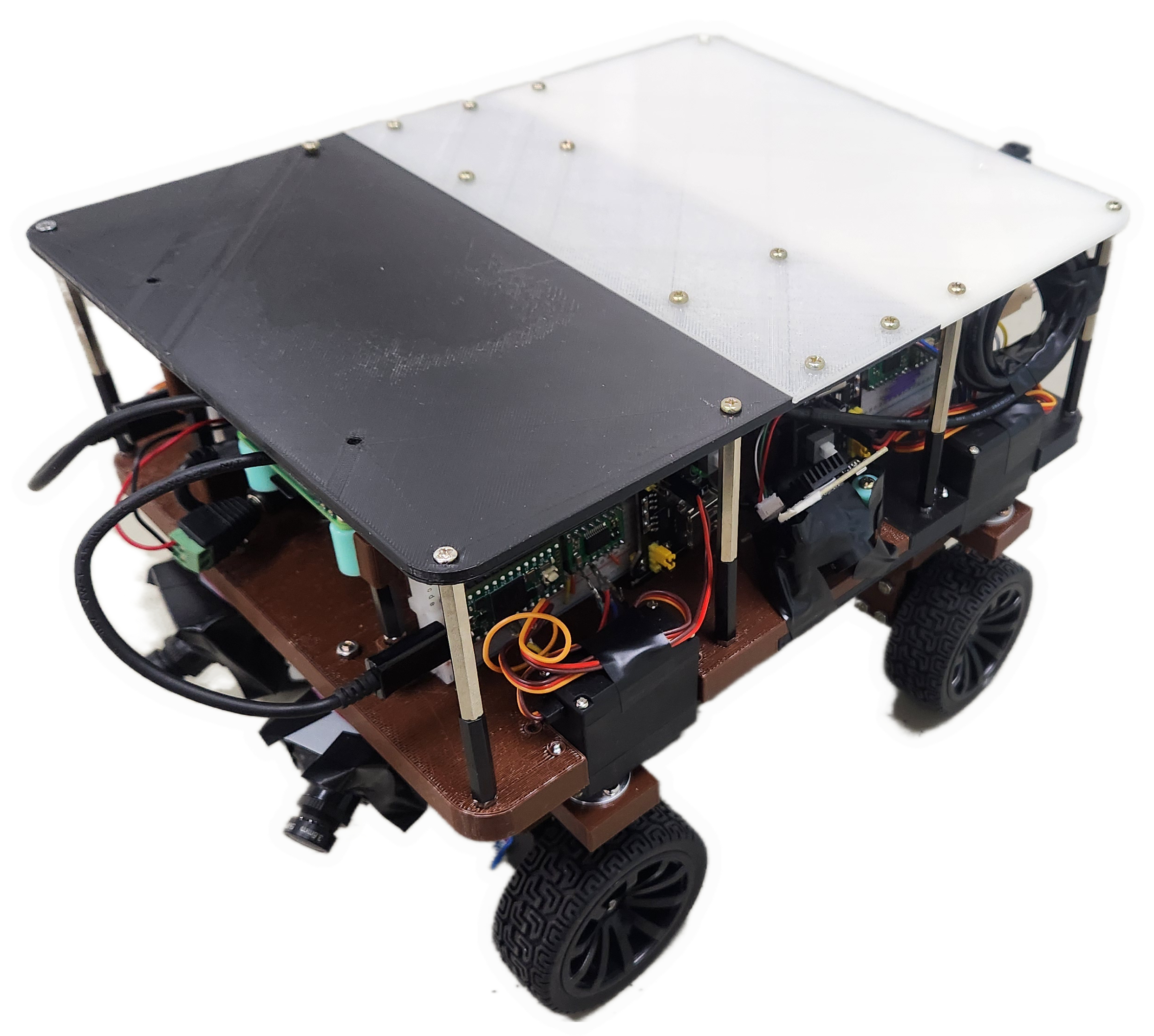
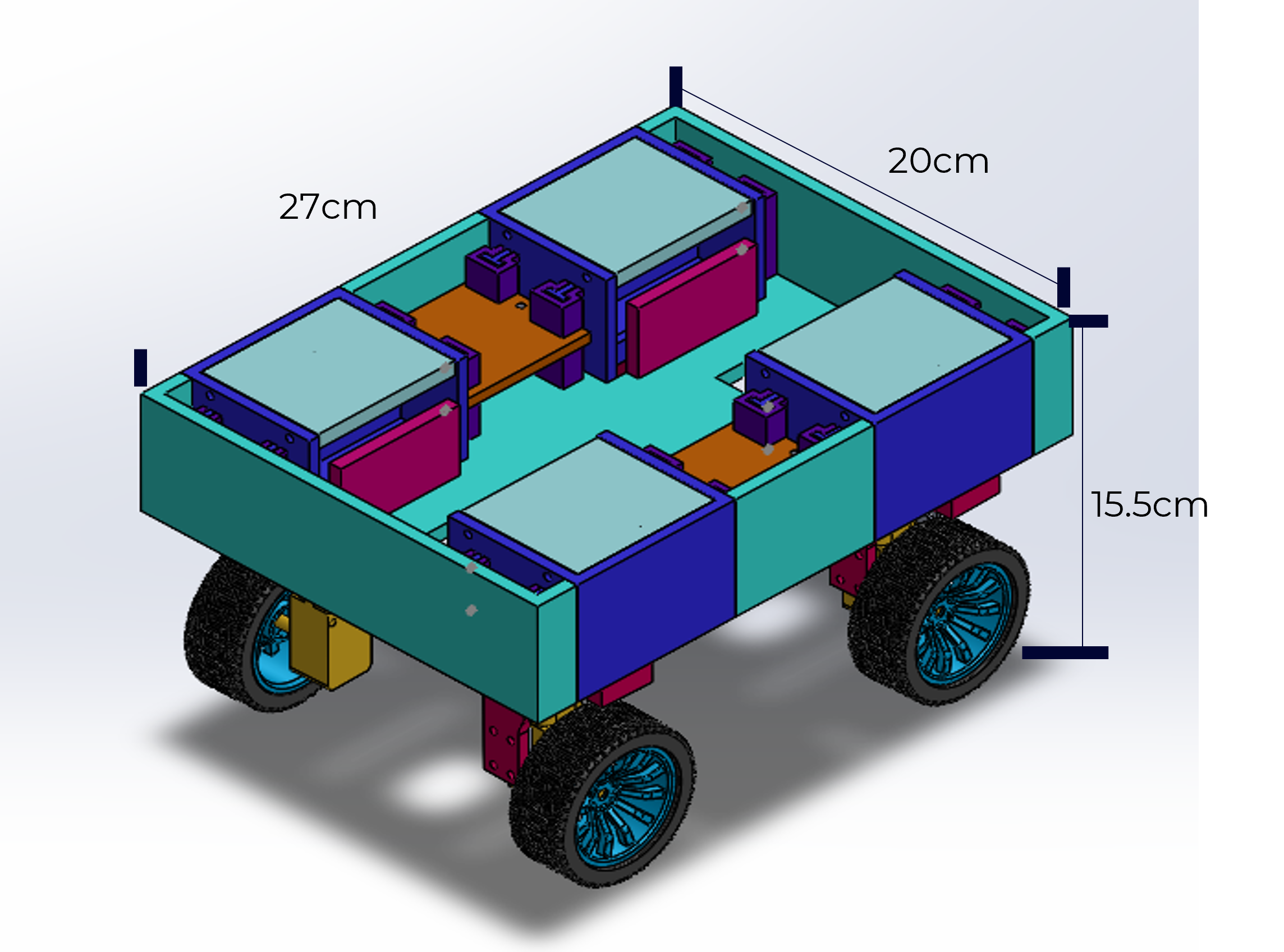
4개의 독립적인 wheel을 작동시키기 위해 각각의 wheel에 명령을 내려줄 수 있는 teensy를 부여했다.
강화학습 모델에 적용될 input을 위한 camera data processing과 강화학습 모델을 이용한 action 결정을 위해 2개의 Raspberry Pi를 부착하였다.
또한 각 motor의 전원을 제어하기 위해서 12V 배터리를 step-down converter를 사용해 7V로 낮춘다음, 각 모터에 5V를 할당해주었다.
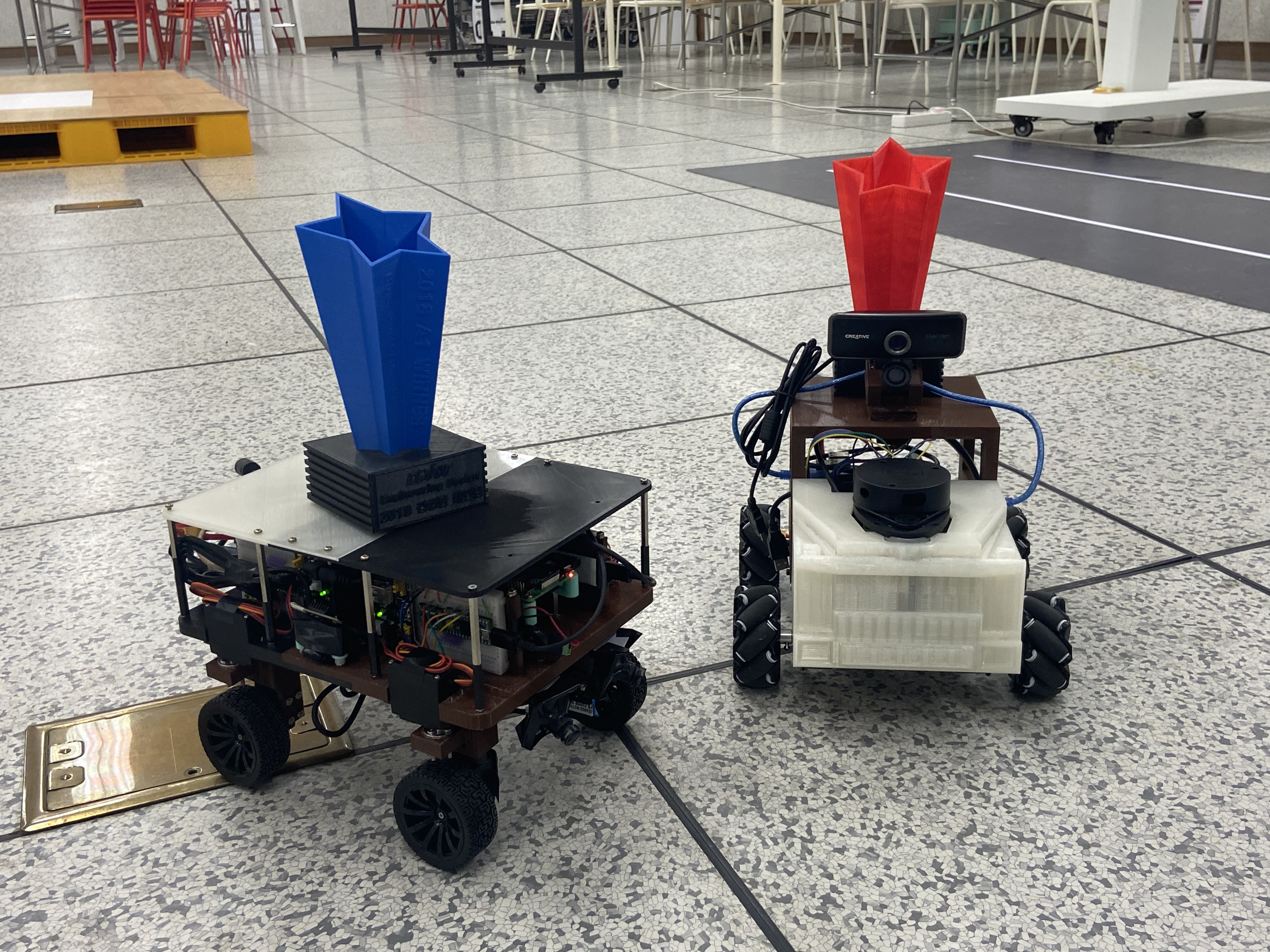
그로써 설계한 3D모델과 실제 차량의 모습은 아래와 같다.
이 차량에서 특징적으로 취할 수 있는 action은 크게 3가지가 있다.
- Straight Mode
- Diagonal Mode
- Zero Turn Mode

Software
차량을 자율주행시키기 위해서 주변 환경을 인지한 이후, 해당 환경에서 필요한 action을 결정해야한다.
여기서 Action을 결정하기 위한 model로 우리는 강화학습 모델을 선택했다.
처음에는 3D model을 바로 강화학습에 적용시키는 방안을 생각해보았지만,
시간적 제약, 3D 환경의 강화학습 제작시 실제 환경과의 차이점 때문에 발생하는 차이를 극복하기 위해 2D환경에서 강화학습 model을 학습시켰다.
2D환경에서 학습시킨 simulation 영상은 이와 같다.
(4Wheel Steering의 장점을 살리기 위해서 simulation부터 real world까지 실행가능한 동작을 Straight, Diagonal, Zero turn 3가지 모드로 제한하였다.)
이 model의 input으로는 차량으로부터 좌, 우, 대각선 좌, 대각선 우의 방향으로 차선까지의 거리를 준다.
이 거리는 camera에서
calibration -> grayscale transform -> blurring -> Canny edge detection -> Hough Line Detection -> Distance Calculation
과정을 거쳐서 얻게 된다.
얻어진 distance data는 RL model의 input으로 들어가 차량을 작동시킨다.
Result
실제 환경에서 구동 영상은 아래와 같다.

실제로 실패도 한번씩 하게 되지만, 그 외의 상황에서는 상당히 차선을 따라서 잘 주행하는 모습을 볼 수 있다.
이와 같이 실제로 차선을 인식하여 자율주행이 가능한 모델과 차량을 제작해보았으며,
결론적으로 공학적 설계 과목에서 수여하는 A1 Championship in 2024 대회에서 performance prize를 수상하였다.
(performance prize와 design prize 중 performance prize 수상)

코드는 아래 링크에서 확인할 수 있다. Github Link